하이브리드 웨어러블 로봇 슈트의 핵심 기술
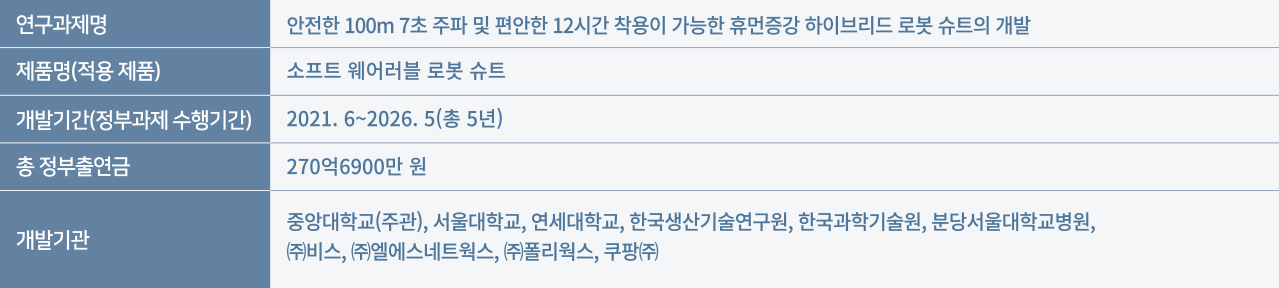
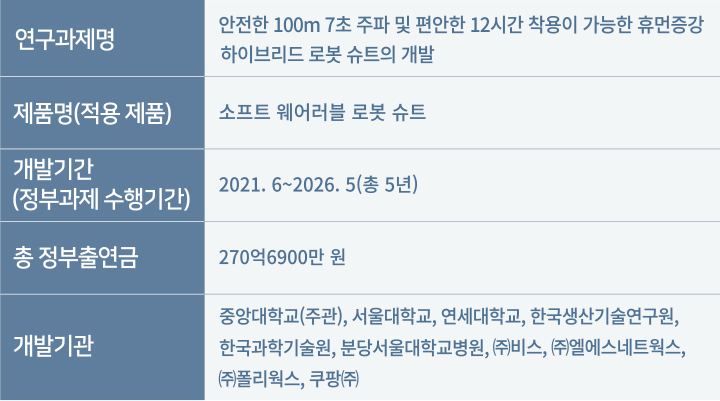
이 교수는 이 과제를 통해 “웨어러블 로봇에 대한 ‘새로운 접근을 제시’하고 동시에 ‘구동기Actuator의 혁신’을 일으킬 것”이라 자신했다.
새로운 접근?
구동기의 혁신? 이를
단순화시키면 ‘편안함’과 ‘빠른 속도’로 정리할 수 있다. 결국 연구팀의 목표는 ‘편안한 웨어러블 로봇 슈트를 입고 놀라울 만큼 빠른 속도’로 움직이는 것이다.
얼핏 당연해 보이는 말이지만, 지금껏 이를 적용해낸 웨어러블 로봇은 없었다. 시도조차 미미했다. 웨어러블 로봇 시장이 이제 막 성장세를 탄 것이 그 이유겠지만, 그
간단한 성능을
구현하는 데 셀 수 없을 만큼 많고 어려운 기술이 필요한 까닭이다.
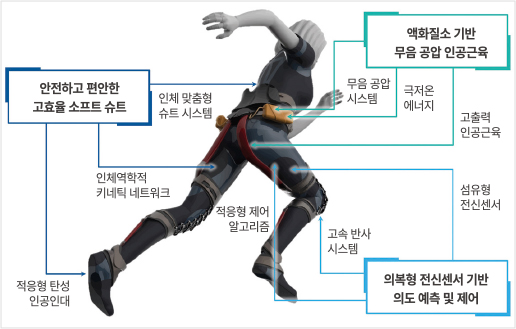
연구팀은 이번 과제를 통해 총 세 가지의 핵심 기술을 개발하고, 이를 한데 모아 슈트를 완성한다는 계획을 세웠다. 핵심 기술은 다음과 같다.
첫째, ‘액체질소 기반 무음 공압 인공근육’ 기술이다. 앞서 언급한 구동기의 혁신이 여기에 속한다. 구동기란
기계에 입력된 에너지를 물리적인 힘이나 운동 형태로
바꾸는 장치다. 로봇 팔을 움직이게 하거나 로봇 슈트가 착용자의 다리를 더 빠르게 움직이도록 돕는 것이 구동기의 역할이다. 연구팀은
새로운 구동기 기술을 이용해
액화가스로 공기를 압축, 인공근육을 만들었는데 이것이 100m를 7초에 달릴 수 있도록 하는 폭발적인 추진력을 제공한다.
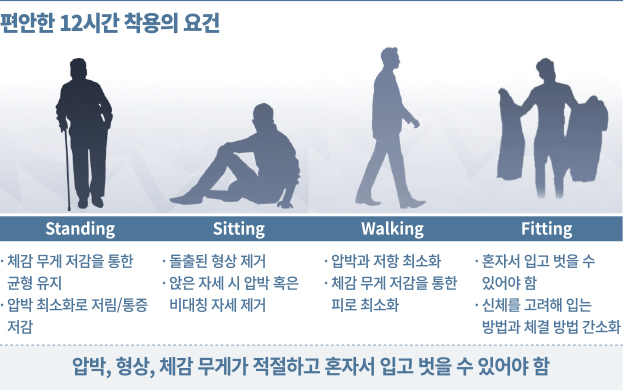
둘째, ‘안전하고 편안한 고효율 소프트 슈트’다. 기존 제품의 경우 무겁고 딱딱한 소재로 구성돼 있다.
장시간 착용하기가 부담스러울 수밖에 없다. 이에 연구팀은
12시간 이상 착용해도 불편하지 않도록 편안하고 가벼운 착용감의 슈트를 고민했다. 로봇 연구에 의류학과 교수가 참여한 것도 그 때문이다. 서울대학교 의류학과 박주연
교수는 의복압센서를 통해 신체에 가해지는 압박 정도를 측정하고, 혈중 젖산 농도를 통해 피로도를 확인하는 등 착용자의
편안함을 향상시킬 수 있는 다양한 방법을
고안했다. 일반적인 의복의 형태와 가깝게 제작해 입고 벗는 과정 또한 편리하게 했다.
셋째, ‘의복형 전신센서 기반 의도 예측 및 제어 시스템’이다. 로봇 슈트 내부에는 착용자의 세세한 근육의
움직임부터 빠른 달리기 동작까지 정밀하게 인식할 수 있는
센서가 장착돼 있다. 이러한 센서에서 측정한 데이터를 통해 로봇은 착용자의 동작을 인식하고 알고리즘에 따라 의도를
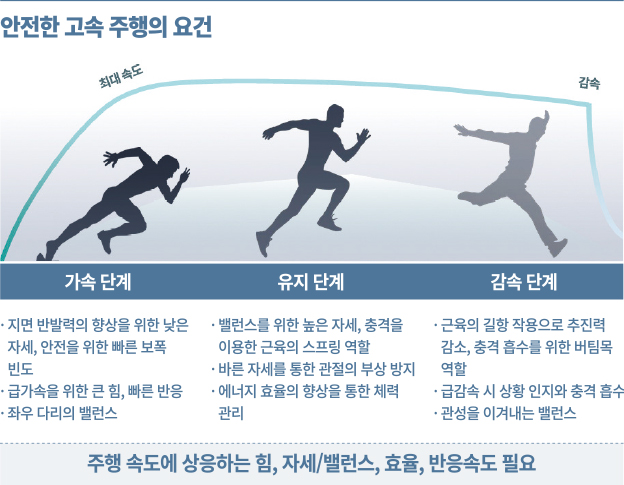
분석한다. 빠르게 변하는 달리기 동작을 지원하고
최적의 주행 전략을 짜는 것도 이 시스템의 기능이다.








 이번 호 PDF 다운로드
이번 호 PDF 다운로드