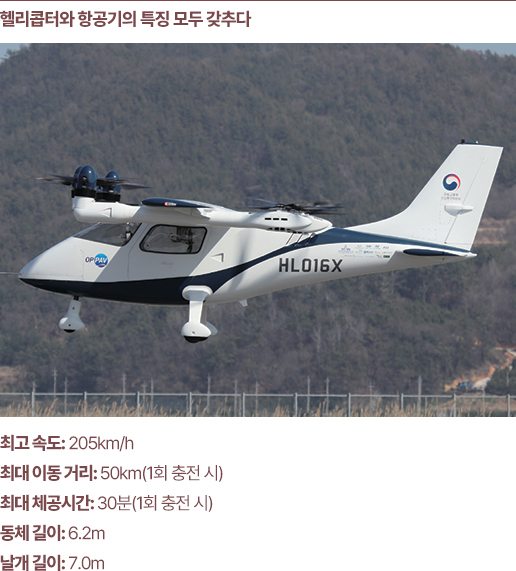
헬리콥터와 항공기의 특징 모두 갖추다
문득 한 가지 궁금증이 생겼다. 헬리콥터나 전투기 등의 소형 기체를 만드는 기술이 이미 존재하는데 도심용 소형 항공기, 다시 말해 UAM 기체를 만드는 게 뭐가 그리 어려울까
하는.
“UAM 기체는 일반적으로 헬리콥터라고 부르는 ‘회전익’과 고정형 날개를 가진 ‘고정익’ 항공기가 결합된 형태이기 때문입니다.”
UAM 기체는 도심 곳곳에서 이륙과 착륙을 반복해야 한다. 따라서 좁은 공간에서 수직으로 뜨고 내릴 수 있어야 한다. 헬리패드Helipad에 뜨고 내리는 헬리콥터처럼 말이다.
고정익 항공기의 빠른 속도, 안정적인 탑승감 또한 중요하다.
이를 위해 연구팀은 틸트로터Tiltrotor 기술을 활용, 복합형 추진 방식의 비행체 개발에 나섰다.
틸트로터는 항공기 프로펠러의 추진 방향을 조절하는 기술이다. 이착륙 등 수직 비행 시에는 헬리콥터처럼 프로펠러가 위쪽을 향하도록 하고, 빠른 속도로 전진하는 수평 비행 때는 정면을
향하도록 방향을 바꿀 수 있다. 프로펠러가 위를 향하면 수직 방향의 추력이 발생하여 기체를 띄우게 되고, 정면을 향하면 전진 비행을 위한 추진력이 발생한다.
연구팀은 기체 앞부분에 총 4개의 틸트로터 프로펠러를 설치하고, 뒷부분에는 수직 추력만을 생성하는 리프트 프로펠러 4개를 설치했다. 프로펠러 반경은 75cm. 각각이 내는 힘은
적지만, 8개가 동시에 돌아가며 거대한 힘을 만들어낸다. 프로펠러의 개수가 늘어나며 안전성 또한 강화되었다. 운행 중 1~2개 프로펠러가 고장이 나도, 다른 프로펠러들이 작동한다면
무사히 비행을 마칠 수 있기 때문이다.
자율주행 모빌리티 시대 흐름에 맞게 기체 자율비행 시스템도 구축했다. 위성 관성항법장치GPS/INS와 대기압력계기, 레이더/레이저 고도계 등 다양한 센서를
활용해 비행 상태를
실시간으로 감지 및 통제하고 자동 이착륙, 자동 제자리비행, 비상 상황 발생 시 회기하는 자동 귀환 기능을 도입했다. 하나의 조종간으로 모든 기능을 사용할 수 있도록 설계해
조종사의 편의성을 높였고, 비행 중에 발생할 수 있는 시스템 고장에 대비해 안정성을 유지하는 3중화 비행제어 시스템도 마련했다. 예기치 못한 상황으로 조종이 어려워지면 여분의
시스템이 작동해 자동으로 비행을 지속시킨다. 도심 위를 비행하는 모빌리티인 만큼 무엇보다 안전을 확보하는 것이 중요하다는 방침에서다.



 이번 호 PDF 다운로드
이번 호 PDF 다운로드 



